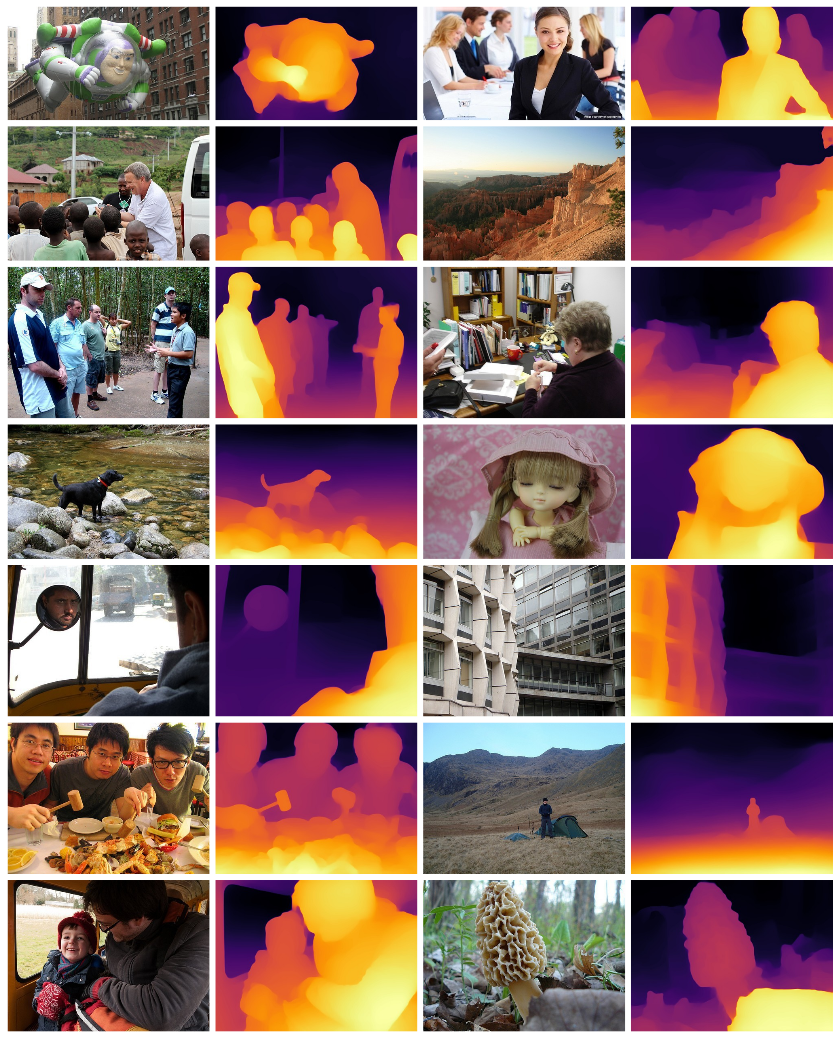

Model Description
MiDaS computes relative inverse depth from a single image. The repository provides multiple models that cover different use cases ranging from a small, high-speed model to a very large model that provide the highest accuracy. The models have been trained on 10 distinct datasets using multi-objective optimization to ensure high quality on a wide range of inputs.
Dependencies
MiDaS depends on timm. Install with
pip install timm
Example Usage
Download an image from the PyTorch homepage
import cv2
import torch
import urllib.request
import matplotlib.pyplot as plt
url, filename = ("https://github.com/pytorch/hub/raw/master/images/dog.jpg", "dog.jpg")
urllib.request.urlretrieve(url, filename)
Load a model (see https://github.com/intel-isl/MiDaS/#Accuracy for an overview)
model_type = "DPT_Large" # MiDaS v3 - Large (highest accuracy, slowest inference speed)
#model_type = "DPT_Hybrid" # MiDaS v3 - Hybrid (medium accuracy, medium inference speed)
#model_type = "MiDaS_small" # MiDaS v2.1 - Small (lowest accuracy, highest inference speed)
midas = torch.hub.load("intel-isl/MiDaS", model_type)
Move model to GPU if available
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
midas.to(device)
midas.eval()
Load transforms to resize and normalize the image for large or small model
midas_transforms = torch.hub.load("intel-isl/MiDaS", "transforms")
if model_type == "DPT_Large" or model_type == "DPT_Hybrid":
transform = midas_transforms.dpt_transform
else:
transform = midas_transforms.small_transform
Load image and apply transforms
img = cv2.imread(filename)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
input_batch = transform(img).to(device)
Predict and resize to original resolution
with torch.no_grad():
prediction = midas(input_batch)
prediction = torch.nn.functional.interpolate(
prediction.unsqueeze(1),
size=img.shape[:2],
mode="bicubic",
align_corners=False,
).squeeze()
output = prediction.cpu().numpy()
Show result
plt.imshow(output)
# plt.show()
References
Towards Robust Monocular Depth Estimation: Mixing Datasets for Zero-shot Cross-dataset Transfer
Vision Transformers for Dense Prediction
Please cite our papers if you use our models:
@article{Ranftl2020,
author = {Ren\'{e} Ranftl and Katrin Lasinger and David Hafner and Konrad Schindler and Vladlen Koltun},
title = {Towards Robust Monocular Depth Estimation: Mixing Datasets for Zero-shot Cross-dataset Transfer},
journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)},
year = {2020},
}
@article{Ranftl2021,
author = {Ren\'{e} Ranftl and Alexey Bochkovskiy and Vladlen Koltun},
title = {Vision Transformers for Dense Prediction},
journal = {ArXiv preprint},
year = {2021},
}
